הקדמה
זינט די שפּעטע 1960ער און פריע 1970ער יאָרן, זענען רובֿ טראַדיציאָנעלע לופט פאָטאָגראַפֿיע סיסטעמען געוואָרן ערזעצט דורך לופט און לופטפאָרט עלעקטראָ-אָפּטישע און עלעקטראָנישע סענסאָר סיסטעמען. כאָטש טראַדיציאָנעלע לופט פאָטאָגראַפֿיע אַרבעט בפֿרט אין דער זעבאר-ליכט כוואַליע לענג, פּראָדוצירן מאָדערנע לופט און ערד-באַזירטע ווײַט סענסינג סיסטעמען דיגיטאַלע דאַטן וואָס דעקן די זעבאר ליכט, רעפֿלעקטירט אינפֿראַרויט, טערמיש אינפֿראַרויט, און מיקראָוועוו ספּעקטראַלע געגנטן. טראַדיציאָנעלע וויזועלע אינטערפּרעטאַציע מעטאָדן אין לופט פאָטאָגראַפֿיע זענען נאָך נוצלעך. אָבער, ווײַט סענסינג דעקט אַ ברייטערע קייט פון אַפּליקאַציעס, אַרייַנגערעכנט נאָך אַקטיוויטעטן ווי טעאָרעטיש מאָדעלירן פון ציל אייגנשאַפֿטן, ספּעקטראַלע מעסטונגען פון אָביעקטן, און דיגיטאַלע בילד אַנאַליז פֿאַר אינפֿאָרמאַציע עקסטראַקציע.
ווײַט סענסינג, וואָס באַציט זיך צו אַלע אַספּעקטן פון נישט-קאָנטאַקט לאַנג-רייכווייט דעטעקציע טעקניקס, איז אַ מעטאָד וואָס ניצט עלעקטראָמאַגנעטיזם צו דעטעקטירן, רעקאָרדירן און מעסטן די כאַראַקטעריסטיקס פון אַ ציל און די דעפֿיניציע איז געווען ערשטער פארגעשטעלט אין די 1950ער יאָרן. דאָס פעלד פון ווײַט סענסינג און מאַפּינג, עס איז צעטיילט אין 2 סענסינג מאָדעס: אַקטיוו און פּאַסיוו סענסינג, פון וועלכע לידאַר סענסינג איז אַקטיוו, טויגיק צו נוצן זײַן אייגענע ענערגיע צו אַרויסגעבן ליכט צו דער ציל און דעטעקטירן די ליכט רעפלעקטירט פון אים.
אַקטיוו לידאַר סענסינג און אַפּלאַקיישאַן
לידאר (ליכט דעטעקציע און ריינדזשינג) איז א טעכנאלאגיע וואס מעסט דיסטאנץ באזירט אויף דער צייט פון ארויסשיקן און באקומען לייזער סיגנאלן. מאנchmal ווערט לופט-געבוירן לידאר גענוצט אויסטוישלעך מיט לופט-געבוירן לייזער סקענירן, מאַפּינג, אדער לידאר.
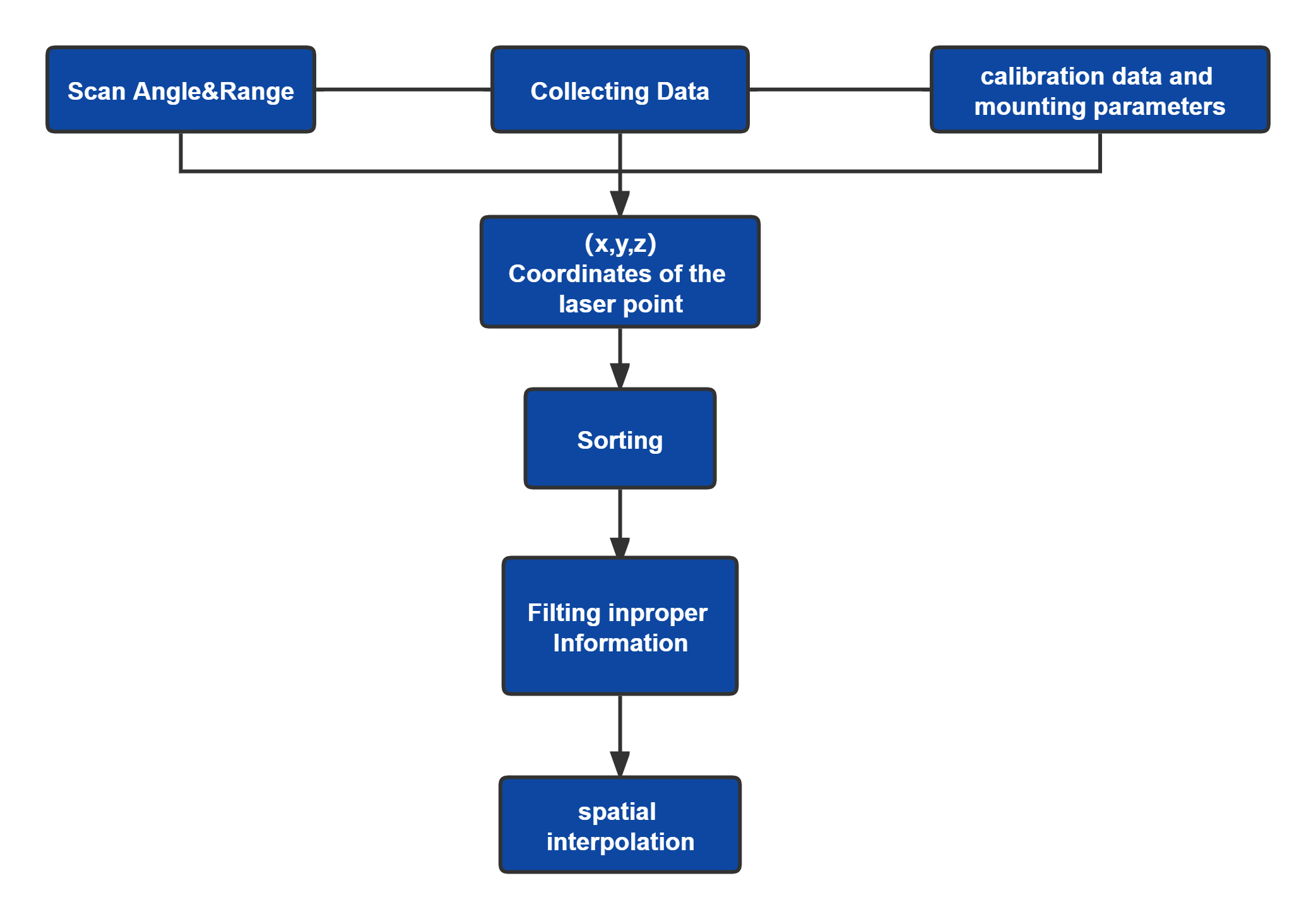
דאָס איז אַ טיפּישער פלוס-טשאַרט וואָס ווײַזט די הויפּט טריט פון פּונקט דאַטן פּראַסעסינג בעת LiDAR באַניץ. נאָך זאַמלען די (x, y, z) קאָאָרדינאַטן, קען סאָרטירן די פונקטן פֿאַרבעסערן די עפֿעקטיווקייט פון דאַטן רענדערינג און פּראַסעסינג. אין דערצו צו דער געאָמעטרישער פּראַסעסינג פון LiDAR פונקטן, איז די אינטענסיטעט אינפֿאָרמאַציע פֿון LiDAR פֿידבעק אויך נוצלעך.
אין אלע ווייט-דעטעקטינג און מאַפּינג אַפּליקאַציעס, האט LiDAR דעם באַזונדערן מייַלע פון באַקומען מער פּינקטלעכע מעסטונגען אומאָפּהענגיק פון זונשייַן און אַנדערע וועטער עפֿעקטן. א טיפּיש ווייט-דעטעקטינג סיסטעם באַשטייט פון צוויי טיילן, אַ לאַזער ראַנגעפינדער און אַ מעסטונג סענסאָר פֿאַר פּאָזיציאָנירן, וואָס קען גלייך מעסטן די געאָגראַפֿישע סביבה אין 3D אָן געאָמעטרישע דיסטאָרשאַן ווייַל קיין בילדגעבונג איז נישט ינוואַלווד (די 3D וועלט איז ימאַדזשערד אין די 2D פלאַך).
עטלעכע פון אונדזערע לידאַר קוואלן
אויג-זיכערע לידאַר לאַזער מקור ברירות פֿאַר סענסאָר


