הקדמה
זינט די שפּעט 1960 ס און פרי 1970 ס, רובֿ טראדיציאנעלן לופט פאָטאָגראַפיע סיסטעמען זענען ריפּלייסט דורך לופט-באָרנע און אַעראָספּאַסע עלעקטראָ-אָפּטיש און עלעקטראָניש סענסער סיסטעמען. בשעת בעקאַבאָלעדיק לופט פאָטאָגראַפיע אַרבעט בפֿרט אין די ווייוולענגט פון קענטיק ליכט, מאָדערן לופט סענסינג סיסטעמען פּראָדוצירן דיגיטאַל דאַטן וואָס דעקן די קענטיק ליכט, שפיגלט ינפרערעד, טערמאַל ינפרערעד און מייקראַווייוו ספּעקטראַל מקומות. טראַדיציאָנעל וויזשאַוואַל ינטערפּריטיישאַן מעטהאָדס אין לופט פאָטאָגראַפיע זענען נאָך נוציק. נאָך, ווייַט סענסינג קאָווערס אַ ברייט קייט פון אַפּלאַקיישאַנז, אַרייַנגערעכנט נאָך אַקטיוויטעטן אַזאַ ווי טעאָרעטיש מאָדעלינג פון ציל פּראָפּערטיעס, ספּעקטראַל מעזשערמאַנץ פון אַבדזשעקץ און דיגיטאַל בילד אַנאַליסיס פֿאַר אינפֿאָרמאַציע יקסטראַקשאַן.
רימאָוט סענסינג, וואָס רעפערס צו אַלע אַספּעקץ פון ניט-קאָנטאַקט לאַנג-קייט דיטעקשאַן טעקניקס, איז אַ מעטאָד וואָס ניצט ילעקטראָומאַגנעטיק צו דעטעקט, רעקאָרדירן און מעסטן די קעראַקטעריסטיקס פון אַ ציל און די דעפֿיניציע איז געווען ערשטער פארגעלייגט אין די 1950 ס. די פעלד פון ווייַט סענסינג און מאַפּינג, עס איז צעטיילט אין 2 סענסינג מאָדעס: אַקטיוו און פּאַסיוו סענסינג, פון וואָס Lidar סענסינג איז אַקטיוו, קענען צו נוצן זיין אייגענע ענערגיע צו אַרויסלאָזן ליכט צו דעם ציל און דעטעקט די ליכט שפיגלט פון עס.
אַקטיוו לידאַר סענסינג און אַפּלאַקיישאַן
לידאַר (ליכט דיטעקשאַן און ריינדזשינג) איז אַ טעכנאָלאָגיע וואָס מעסטן דיסטאַנסע באזירט אויף די צייט פון ימיטינג און ריסיווינג לאַזער סיגנאַלז. טייל מאָל אַירבאָרנע LiDAR איז געווענדט ינטערטשיינדזשאַבלי מיט אַירבאָרנע לאַזער סקאַנינג, מאַפּינג אָדער LiDAR.
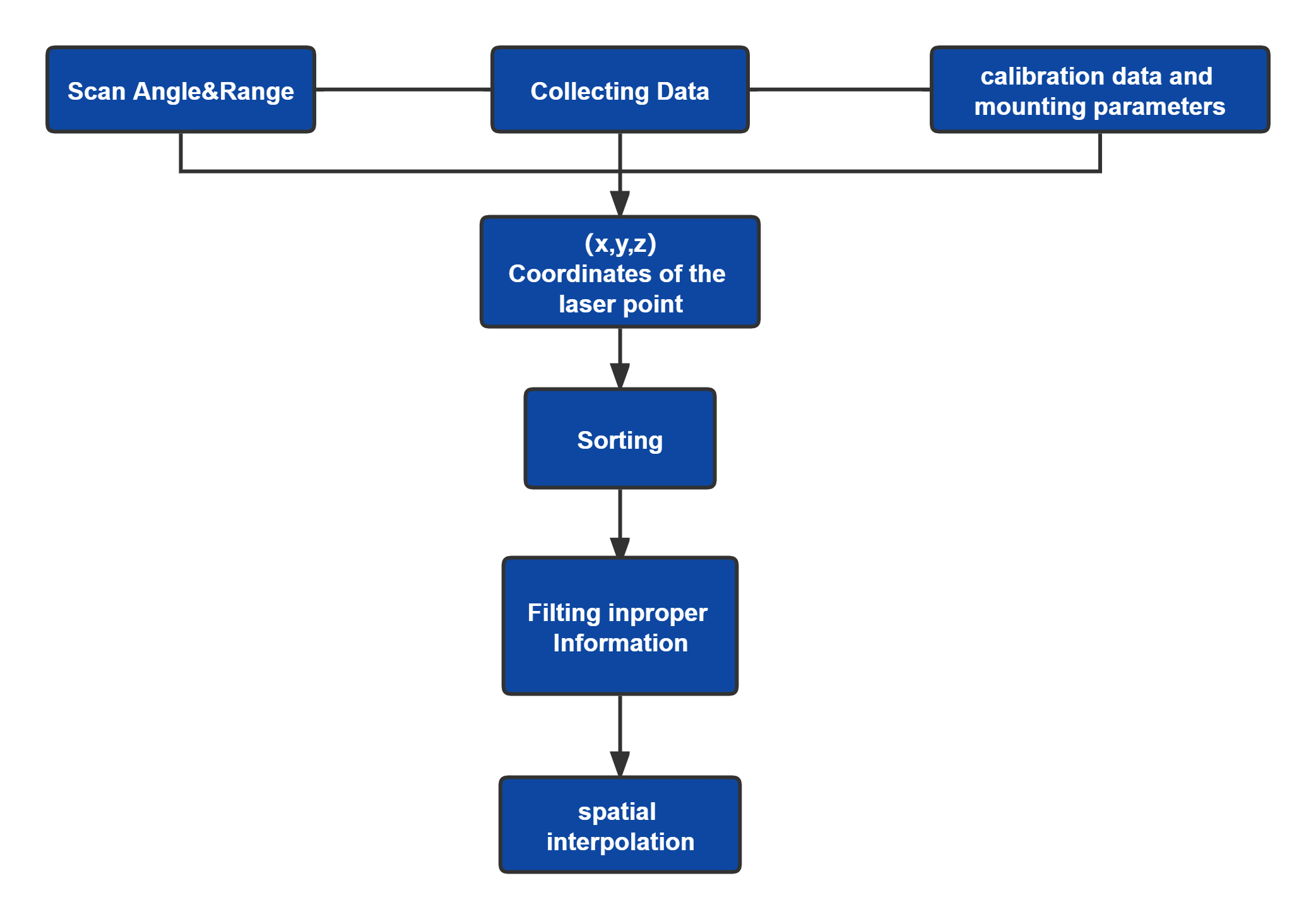
דאָס איז אַ טיפּיש פלאָווטשאַרט וואָס ווייַזן די הויפּט סטעפּס פון פונט דאַטן פּראַסעסינג בעשאַס LiDAR באַניץ. נאָך קאַלעקטינג די ( x, y, z) קאָואָרדאַנאַץ, סאָרטינג די פונקטן קענען פֿאַרבעסערן די עפעקטיווקייַט פון דאַטן רענדערינג און פּראַסעסינג. אין אַדישאַן צו די דזשיאַמעטריק פּראַסעסינג פון LiDAR ווייזט, די ינטענסיטי אינפֿאָרמאַציע פון LiDAR באַמערקונגען איז אויך נוציק.
אין אַלע אַפּלאַקיישאַנז פֿאַר ווייַט סענסינג און מאַפּינג, LiDAR האט די בוילעט מייַלע צו באַקומען מער פּינטלעך מעזשערמאַנץ ינדיפּענדאַנטלי פון זונשייַן און אנדערע וועטער יפעקץ. א טיפּיש ווייַט סענסינג סיסטעם באשטייט פון צוויי טיילן, אַ לאַזער ראַנגעפינדער און אַ מעזשערמאַנט סענסער פֿאַר פּאַזישאַנינג, וואָס קענען גלייַך מעסטן די דזשיאַגראַפיק סוויווע אין 3 ד אָן דזשיאַמעטריק דיסטאָרשאַן ווייַל קיין ימאַגינג איז ינוואַלווד (די 3 ד וועלט איז ימאַדזשד אין די 2 ד פלאַך).
עטלעכע פון אונדזער לידאַר מקור
אויג-זיכער LiDAR לייזער מקור ברירות פֿאַר סענסער


